Deburring, Cutting and Finishing of Weir for Complex-Shaped Work
All These Works are Made Possible by XCEED's Technology
Arrival of XTG
What is XTG Deburring Machine?
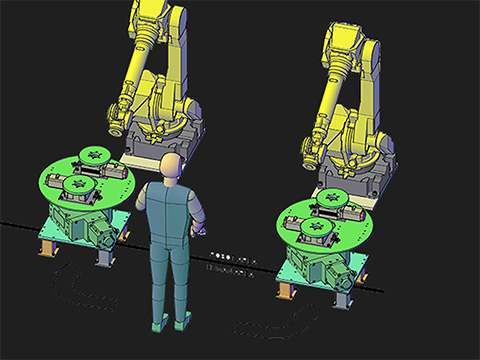
By combining a highly reliable 6-Axis Robot based on our unique concept with Index Table, it achieves a high degree of flexibility in movement. This machine actualizes the deburring for a variety of workpieces.
Development Background / Challenges from the Past
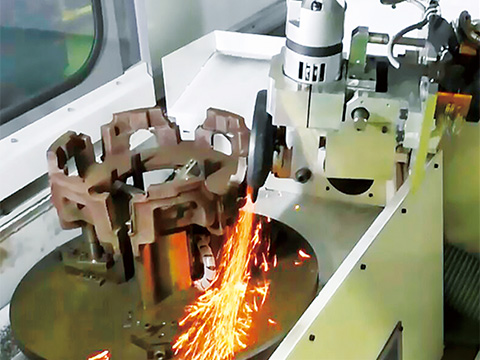
Traditionally, deburring and cutting of weir in metals such as FC and aluminum were primarily done manually using grinding machines, where each piece was processed individually. This method took a lot of time for cutting and finishing, making it difficult to achieve a clean and uniform finish. This challenge has contributed to the high production costs associated with material finishing processes.
Advantages

Floating Mechanism
A floating mechanism is installed in the grinder unit at the tip of the robotic arm. By enabling smooth swiveling movements of the grinder unit, it prevents excessive burr removal and also prevents abnormal stops due to overload.

Auto Tool Changer (Optional)
The program automatically switches to the optimal tool for the work shape. By eliminating the hassle and time of changing tools, it simplifies the workflow. This enhances the work safety and contributes to reduction of the defect rate.

Promotion of Work Efficiency
The unique reproducibility of the robotic system allows for high-quality finishing while maintaining dimensional accuracy, surface smoothness, and work speed.

Clean Work Environment
Dust-proof and Sound-proof Design Considering the Health of Workers. The structure emphasizes maintainability, making cleaning easier. This is a worker-friendly machine.

Energy Saving
Minimization of the Number of Motors Used and Significant Reduction of Power Consumption Compared with Other Deburring Machines. Energy-Efficient and Lower Running Costs.
Equipment

Deburring Machine for Robots
XCEED Robotic Grinder
XTG Series
(Target:FC / FCV / FCD / BC /AC)
Maximum Payload of Robot:35kg to 70kg
Workpiece Mass (including Work Fixture):5k to 70kg
Workpiece Size:
Maximum 400mm or Φ500mm ×H300mm and less
| Specification | XTG-35 | XTG-50 | XTG-70 | |
|---|---|---|---|---|
| Machine | Maximum Robot Load Capacity | 35kg | 50kg | 70kg |
| Work Mass (Including Workpiece Jig) | 1-30kg | 1-50kg | 1-70kg | |
| Maximum Work Size | 400 mm or φ500 mm x H 250 mm | |||
| Handling Robot | 6-Axis Vertical Articulated Robot | |||
| Robot Holding Target | Grinder Unit | |||
| Worktable Flexibility | 1 | |||
| Robot Degrees of Freedom | 6 | |||
| Overall Freedom | 7 | |||
| Grinder Motor | 900W Spindle Motor | 2.2Kw to 3.7Kw Spindle Motor | ||
| Motor Speed Control | Inverter Control | |||
| Grinder Support Method | Flexible Support | |||
| Grinder Disk | φ180 mm x T6 mm | |||
| Auxiliary Disk (Optional) | φ180 mm or Less | |||
| Controller | Mitsubishi Q-Series DC 24V | |||
| Optional | Safety Device (Optional) | Disk Abnormal Vibration Detection Device | ||
| Tool Change Method (Optional) | Fully Automatic Tool Change | |||
| Equipment | Body Mass | Approximately 3 Tons | Approximately 3.5 Tons | |
| Power Consumption | Up to 10 Kva (8 Kw) | Up to 15 Kva (12 Kw) | ||
| Air Pressure | Min. 0.4 Mpa. | |||
| Air Flow Rate | 2.5 Nm³ / Min | |||
